

Dog Wheelchair - Curb Assist
This was the term project for my first year in mechatronics engineering at the University of Waterloo. Course requirements were to use LEGO NXT/EV3 to show competency in C++/RobotC. The project also had to fulfill a “need”, although this need could have been “Fun” like a pen plotter, I wanted to make a project that was still practical an useful, and pushed my team to pursue a curb assist for dog wheelchairs.
Details
Handicapped dogs that rely on wheelchairs can’t navigate everyday obstacles like curbs, limiting their mobility and safety. This project aimed to build a mechatronics system that automatically detects and scales obstacles between 5cm and 15cm high. The focus was on small dogs in wheelchairs as they are the dogs in wheelchairs that would be too small and weak to get over a curb on their own.
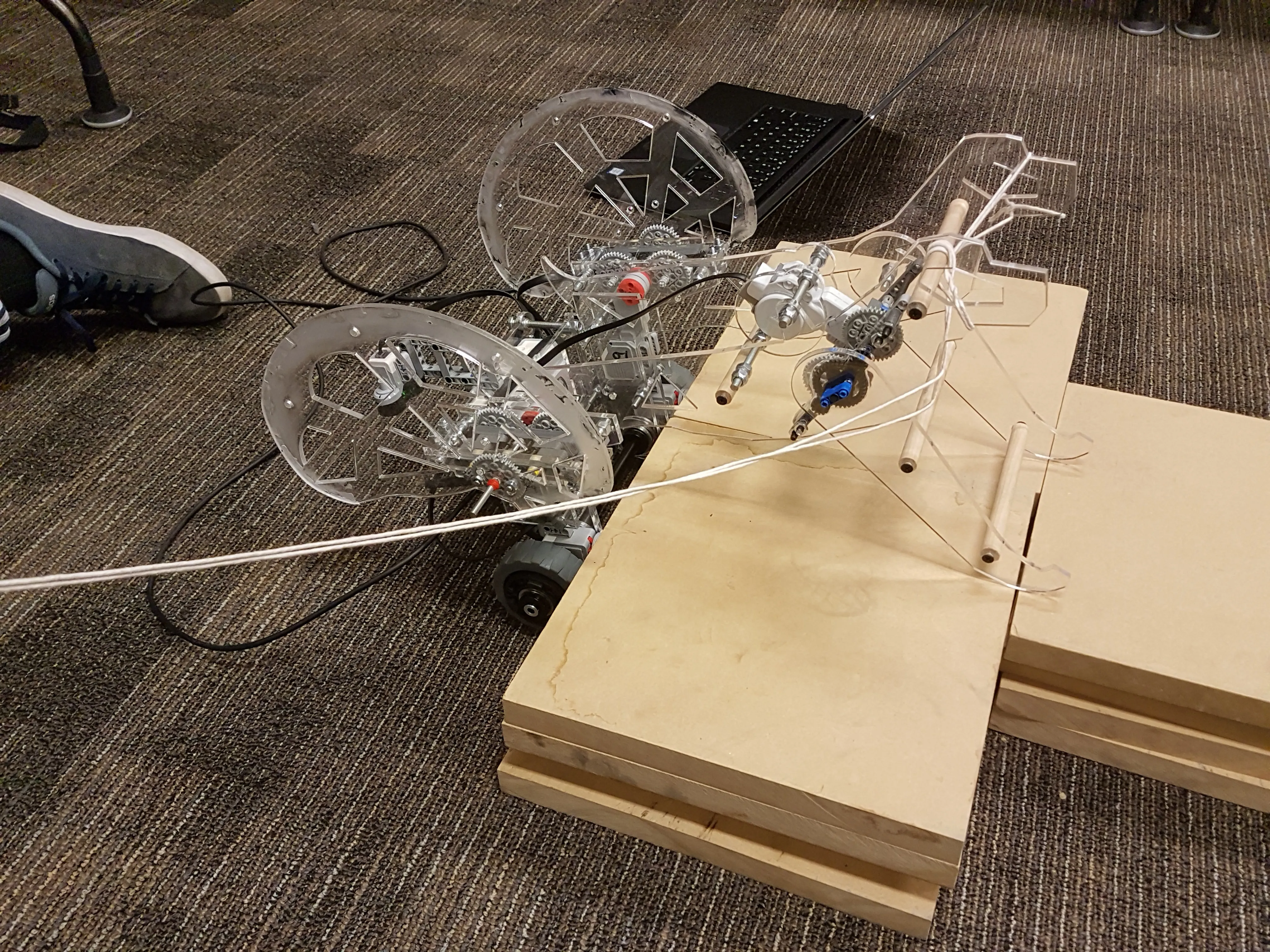
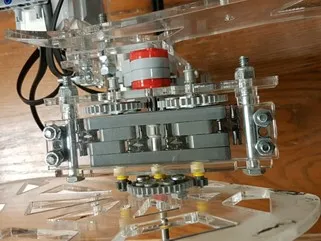
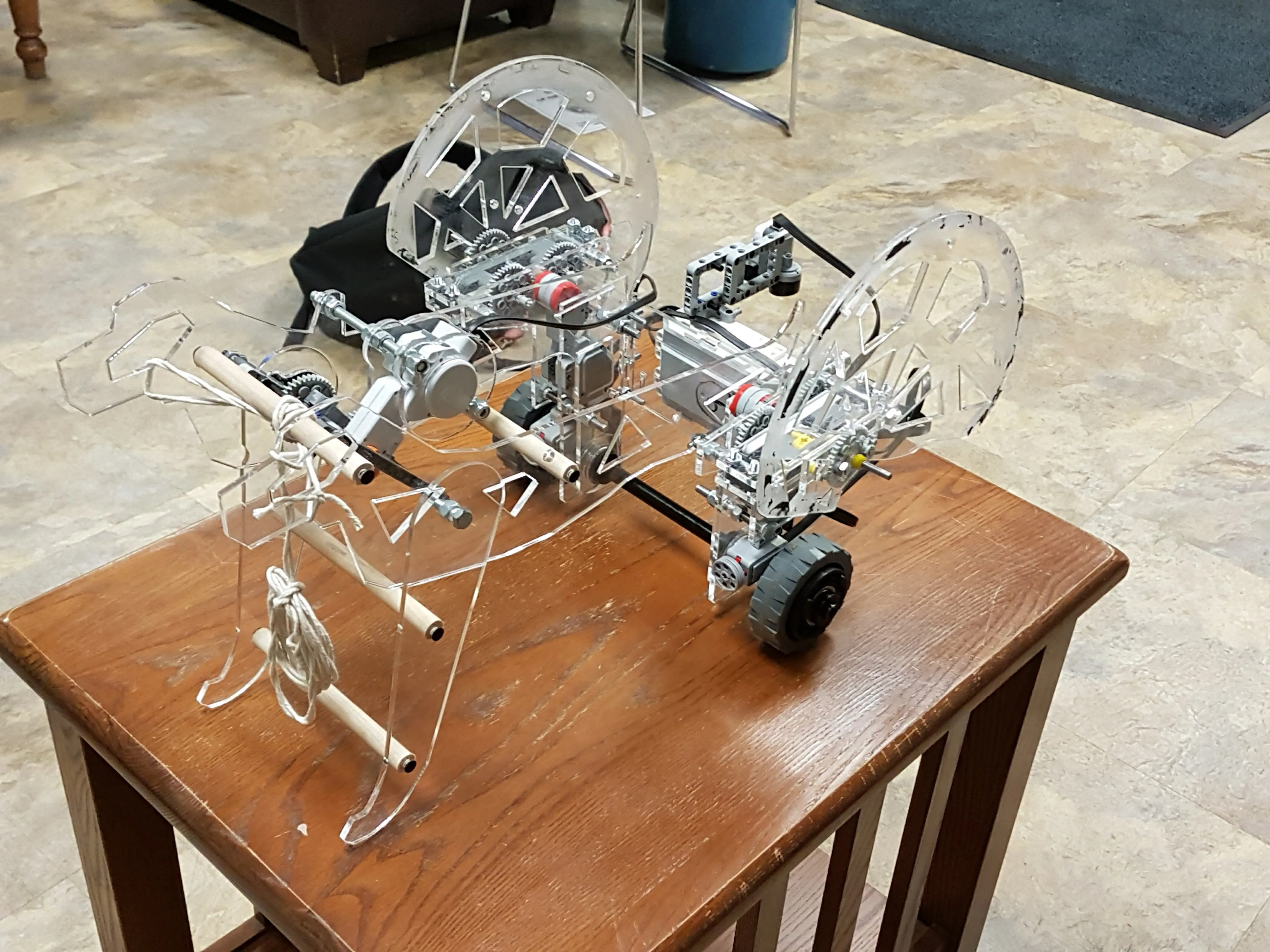
Four designs were proposed and evaluated against weight, cost, speed, and lifting capacity. The winning design used a rotating cam that contacts and rolls on the top surface of an obstacle and lifts the wheelchair over it when triggered by sensors.
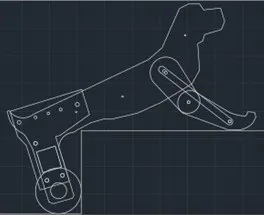
The system detects obstacles via touch and ultrasonic sensors (the combination prevents false triggers), executes an automated lift sequence, monitors for balance loss, and resumes normal movement once clear. For the final demo, a motorized dog silhouette (his name was Ruffus) was built to simulate real movement in place of a live dog.
As the mechanical team member for this project, I measured motors and components using calipers. I made AutoCAD files, laser cut acrylic sheets for structures, and selected and purchased wheels, bearings, rods, and other hardware.