Piezo Actuator Design - Robot Hand
Conventional prosthetic hands use DC motors with gearing, making them heavy, bulky, and rejected by roughly 34% of users. This project explored whether piezoelectric actuation could be a lighter, more elegant alternative. The central question: can a piezo-driven inchworm actuator close a prosthetic finger at a usable speed with enough gripping force? For the proposes of this conceptual design study, we restricted the scope of the above question to a single Degree Of Freedom (DOF) finger joint.
Details
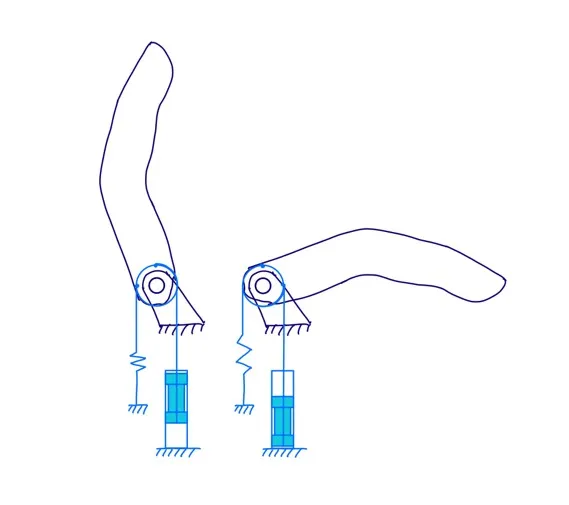
The target specs were a 90-degree range of motion, a closing speed of 100 deg/s, and a 10 N gripping force. Modelling a finger 80mm long (roughly a human index finger), these requirements translated to the inchworm needing to travel at 8.73 mm/s while carrying a peak load of 167 N.
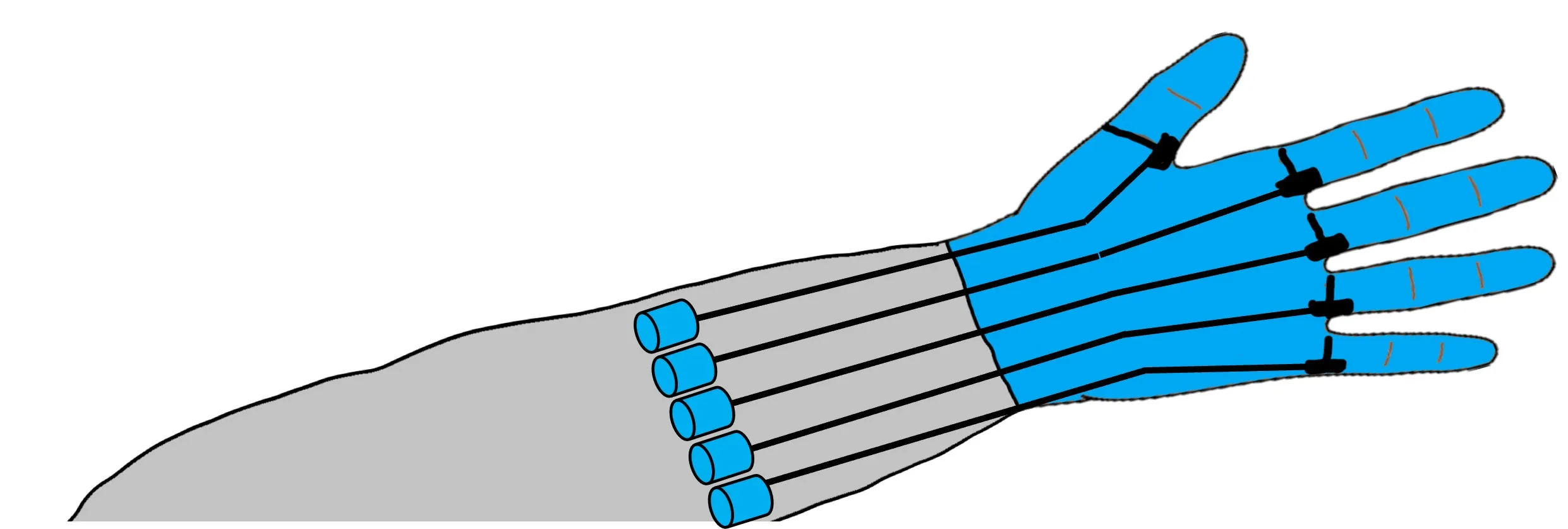
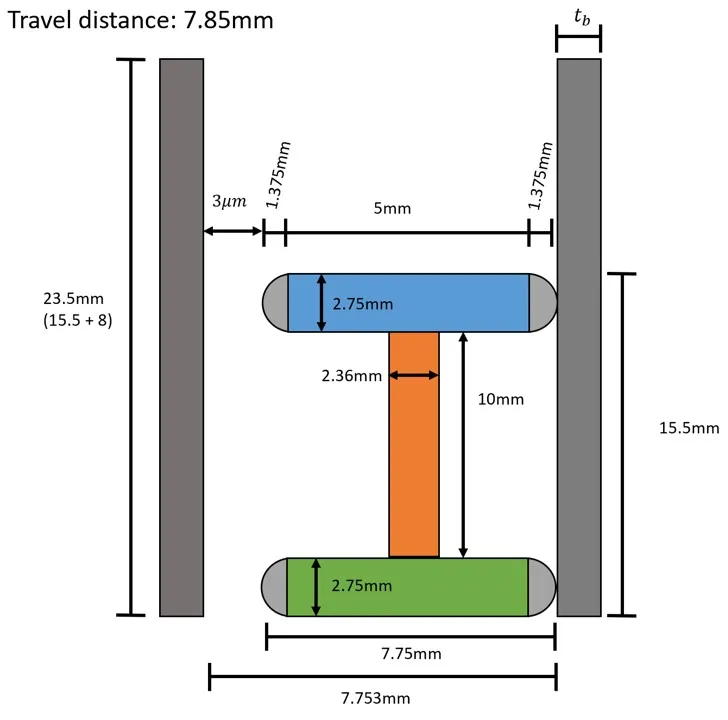
An inchworm actuator was chosen because, unlike a standard piezo stack, it isn’t limited in range of motion — it accumulates tiny steps over time to achieve large displacements. The design consists of two piezo brake actuators clamping against a steel guide tube and a center extender that pushes forward each cycle, mimicking the motion of an inchworm. After sweeping through multiple piezo materials and geometries using Excel calculators and custom MATLAB simulations, PZT-5H was selected for the extender and APC 856 for the brakes, both operating at 194V. The final inchworm is only 3 cm tall, fits inside a 7.75mm diameter tube, and weighs just 31.6 grams. Scaled to all five fingers, a full hand actuation system would weigh approximately 158 grams.
Simulations confirmed the design meets the speed requirement, though performance drops significantly under full 10 N load — which was expected, since maximum grip force only occurs at the end of a closing motion once the fingers have already contacted an object, so this is not an issue. The main limitations identified was the tight 3 μm brake gap needed, which would need physical testing to validate, and the single degree-of-freedom finger model, which would need to be expanded for a more realistic hand. Note about the 3 μm gap: An idea I had that I didn’t get to explore was CTE matching the break stack with the guide tube, and also to use wire-EDM to achieve the tight tube tolerances needed for a 3 μm gap to be consistent and accurate.